
Este posicionador es capaz de alimentar 7 modelos de tuercas diferentes, con la posibilidad de incorporar más modelos cambiando los sistemas de selección, cunas de paso a paso, guías de salida y lineal.

En esta galería os vamos a mostrar el posicionamiento de 2 modelos diferentes de tuercas. A continuación, un recorrido fotográfico de nuestro alimentador trabajando con la tuerca Modelo A:









Y continuamos con la muestra del posicionamiento de la tuerca Modelo B:





Alimentador industrial para 7 tipos de tuercas con protuberancias para soldaduras

Misión y peculiaridades
Sin duda, lo más destacable de este posicionador es que es capaz de alimentar 7 modelos de tuercas diferentes, con la posibilidad de incorporar más modelos cambiando los sistemas de selección, cunas de paso a paso, guías de salida y lineal.
Estos cambios están pensados y diseñados para que resulten fáciles y rápidos de aplicar. Como siempre, se trata de optimizar al máximo la adaptación de las máquinas a los diferentes modelos de piezas a través de los diversos utillajes. En definitiva, todo está enfocado a repercutir positivamente en la fluidez y rentabilidad de la cadena de producción.
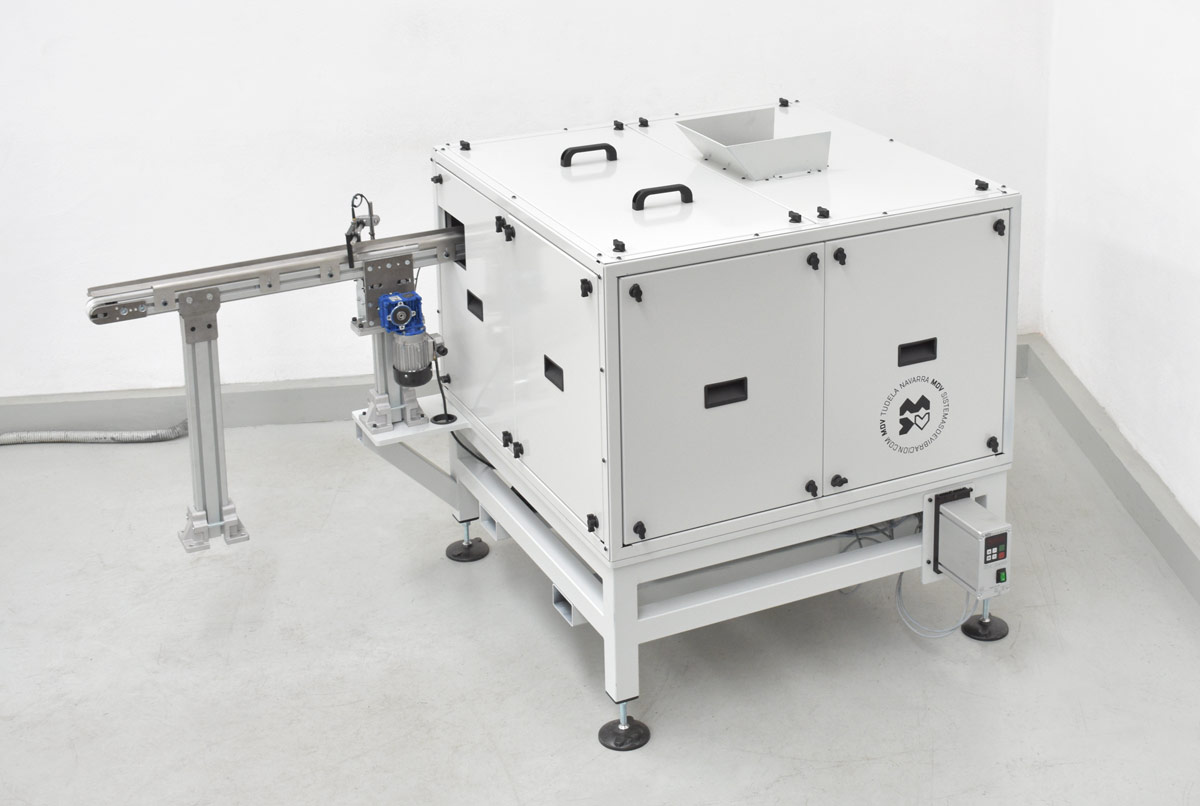
Aunque aquí estamos presentando uno de ellos, la solución que aportamos para este proyecto abarca tres unidades posicionadoras completas. Cada una de ellas se destina a su correspondiente celda independiente de acuerdo a las características de soldadura requeridas por cada mano robótica.
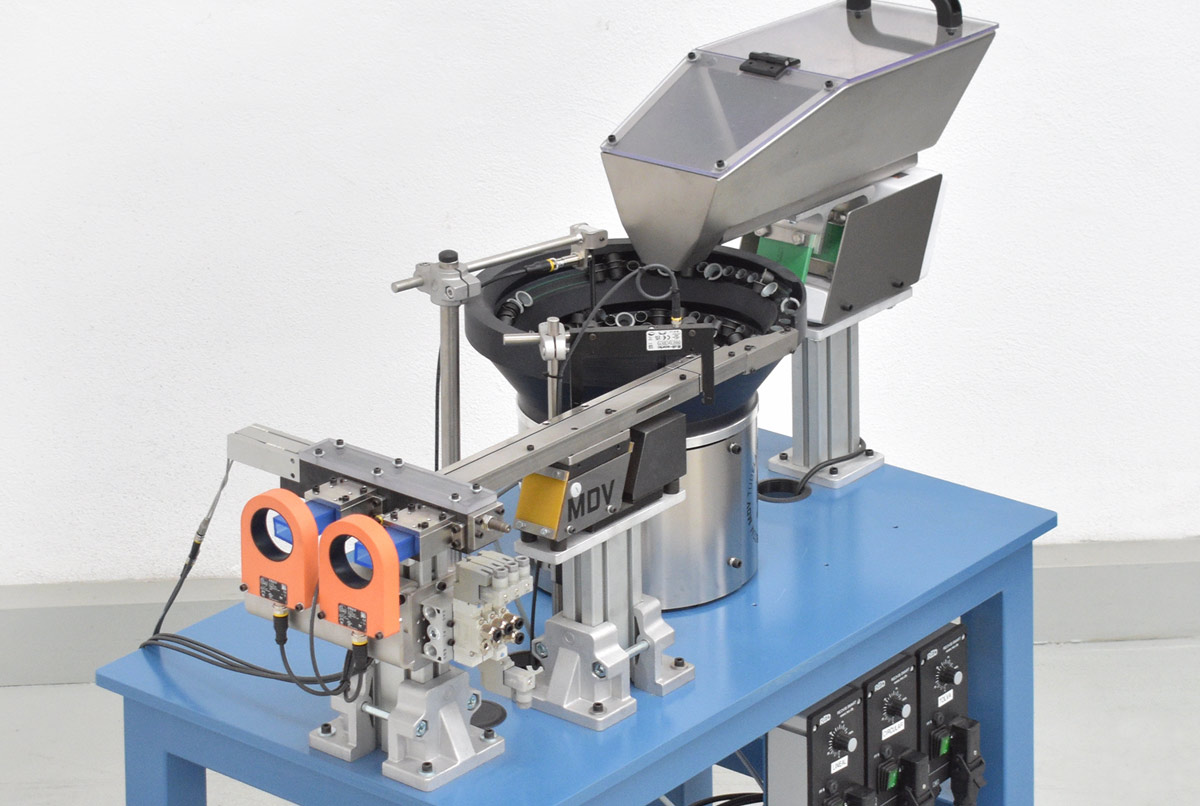
Composición del sistema de posicionamiento
- 1 Tolva de autonomía.
- 1 Base vibratoria circular horaria.
- 1 Tolva de fibra de vidrio. Diámetro: 600 mm.
- 1 Vibrador lineal MDV L-450.
- 1 Mando de control 443.
- 1 Paso a paso.
- 1 Mesa bancada.
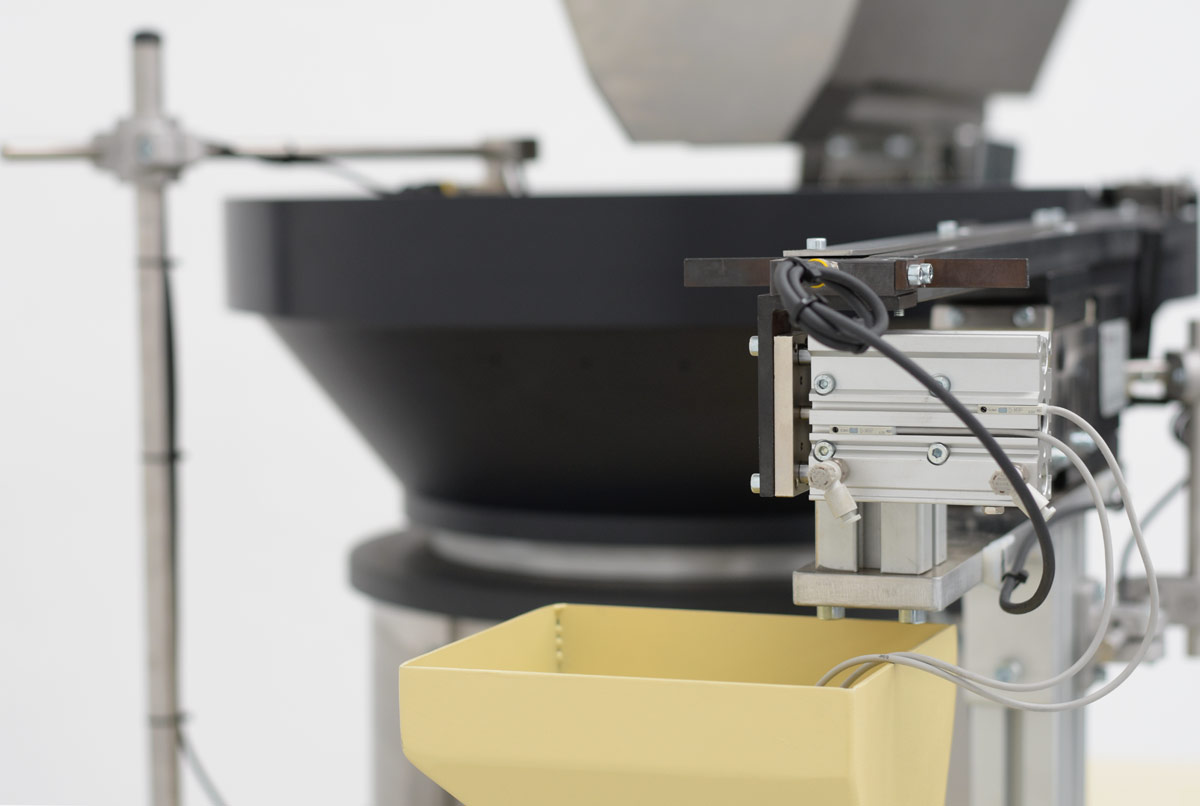
Posición de salida de la pieza
Con las protuberancias hacia abajo.
Número de salidas
1.
Cadencia solicitada
30 piezas / minuto.
Autonomía
4 horas.
Otras soluciones para automoción




›› PARA VER Y ESCUCHAR

Este posicionador es capaz de alimentar 7 modelos de tuercas diferentes, con la posibilidad de incorporar más modelos cambiando los sistemas de selección, cunas de paso a paso, guías de salida y lineal.
En esta galería os vamos a mostrar el posicionamiento de 2 modelos diferentes de tuercas. A continuación, un recorrido fotográfico de nuestro alimentador trabajando con la tuerca Modelo A:
Y continuamos con la muestra del posicionamiento de la tuerca Modelo B:
Alimentador industrial para 7 tipos de tuercas con protuberancias para soldaduras
Misión y peculiaridades
Sin duda, lo más destacable de este posicionador es que es capaz de alimentar 7 modelos de tuercas diferentes, con la posibilidad de incorporar más modelos cambiando los sistemas de selección, cunas de paso a paso, guías de salida y lineal.
Estos cambios están pensados y diseñados para que resulten fáciles y rápidos de aplicar. Como siempre, se trata de optimizar al máximo la adaptación de las máquinas a los diferentes modelos de piezas a través de los diversos utillajes. En definitiva, todo está enfocado a repercutir positivamente en la fluidez y rentabilidad de la cadena de producción.
Aunque aquí estamos presentando uno de ellos, la solución que aportamos para este proyecto abarca tres unidades posicionadoras completas. Cada una de ellas se destina a su correspondiente celda independiente de acuerdo a las características de soldadura requeridas por cada mano robótica.
Composición del sistema de posicionamiento
- 1 Tolva de autonomía.
- 1 Base vibratoria circular horaria.
- 1 Tolva de fibra de vidrio. Diámetro: 600 mm.
- 1 Vibrador lineal MDV L-450.
- 1 Mando de control 443.
- 1 Paso a paso.
- 1 Mesa bancada.
Posición de salida de la pieza
Con las protuberancias hacia abajo.
Número de salidas
1.
Cadencia solicitada
30 piezas / minuto.
Autonomía
4 horas.
Otras soluciones para automoción
›› PARA VER Y ESCUCHAR
Alimentador industrial para 7 tipos de tuercas con protuberancias para soldaduras
Misión y peculiaridades
Sin duda, lo más destacable de este posicionador es que es capaz de alimentar 7 modelos de tuercas diferentes, con la posibilidad de incorporar más modelos cambiando los sistemas de selección, cunas de paso a paso, guías de salida y lineal.
Estos cambios están pensados y diseñados para que resulten fáciles y rápidos de aplicar. Como siempre, se trata de optimizar al máximo la adaptación de las máquinas a los diferentes modelos de piezas a través de los diversos utillajes. En definitiva, todo está enfocado a repercutir positivamente en la fluidez y rentabilidad de la cadena de producción.
Aunque aquí estamos presentando uno de ellos, la solución que aportamos para este proyecto abarca tres unidades posicionadoras completas. Cada una de ellas se destina a su correspondiente celda independiente de acuerdo a las características de soldadura requeridas por cada mano robótica.
Este posicionador es capaz de alimentar 7 modelos de tuercas diferentes, con la posibilidad de incorporar más modelos cambiando los sistemas de selección, cunas de paso a paso, guías de salida y lineal.
En esta galería os vamos a mostrar el posicionamiento de 2 modelos diferentes de tuercas. A continuación, un recorrido fotográfico de nuestro alimentador trabajando con la tuerca Modelo A:
Y continuamos con la muestra del posicionamiento de la tuerca Modelo B:
Composición del sistema de posicionamiento
- 1 Tolva de autonomía.
- 1 Base vibratoria circular horaria.
- 1 Tolva de fibra de vidrio. Diámetro: 600 mm.
- 1 Vibrador lineal MDV L-450.
- 1 Mando de control 443.
- 1 Paso a paso.
- 1 Mesa bancada.
Posición de salida de la pieza
Con las protuberancias hacia abajo.
Número de salidas
1.
Cadencia solicitada
30 piezas / minuto.
Autonomía
4 horas.