








Alimentador industrial para circlips

Misión y peculiaridades
Hay casos en los que buscar la solución más eficaz implica, gratamente, encontrar la opción más ingeniosa. Este es uno de ellos.
Lograr la orientación exigida para estos circlips presentaba muchas complicaciones si pretendíamos hacerlo a través de los vibradores, así que optamos por resolverlo mediante dos movimientos posteriores…
Esto significa que la responsabilidad recaía en nuestro paso a paso, algo que abordamos con confianza gracias a nuestra experiencia combinando e integrando estos sistemas en nuestros posicionadores.
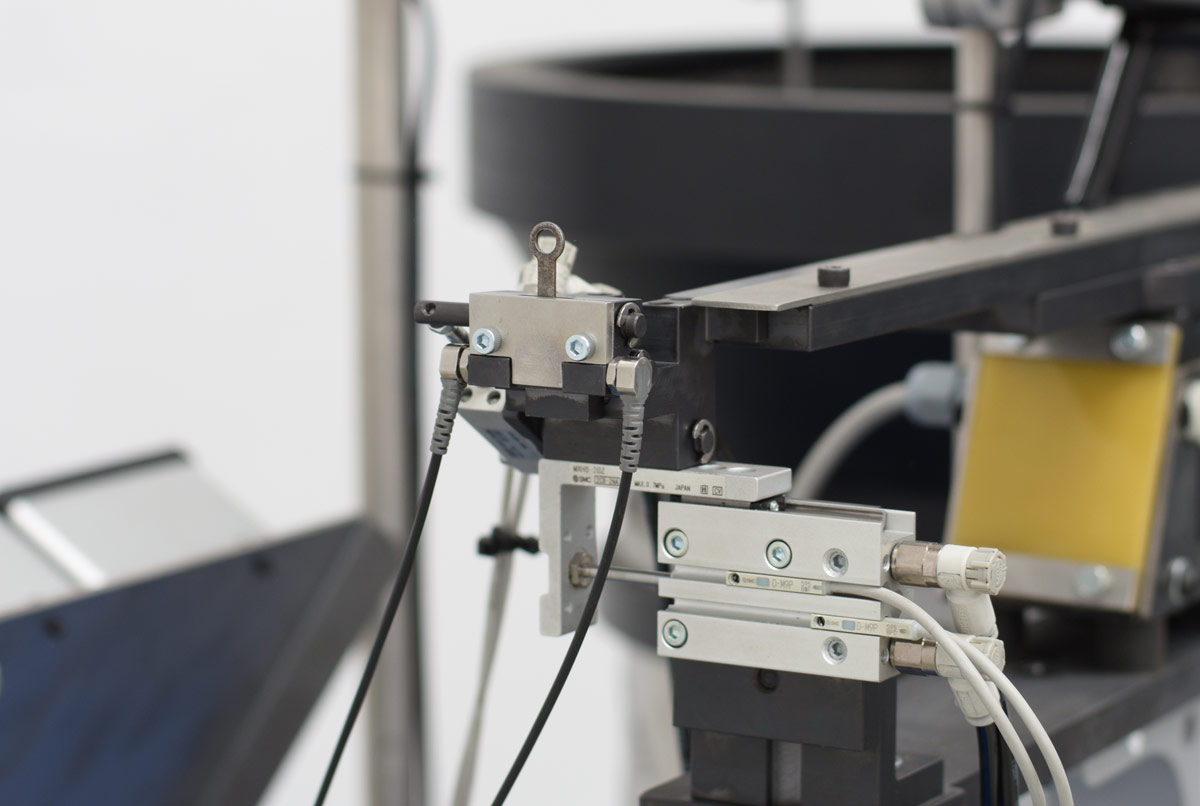
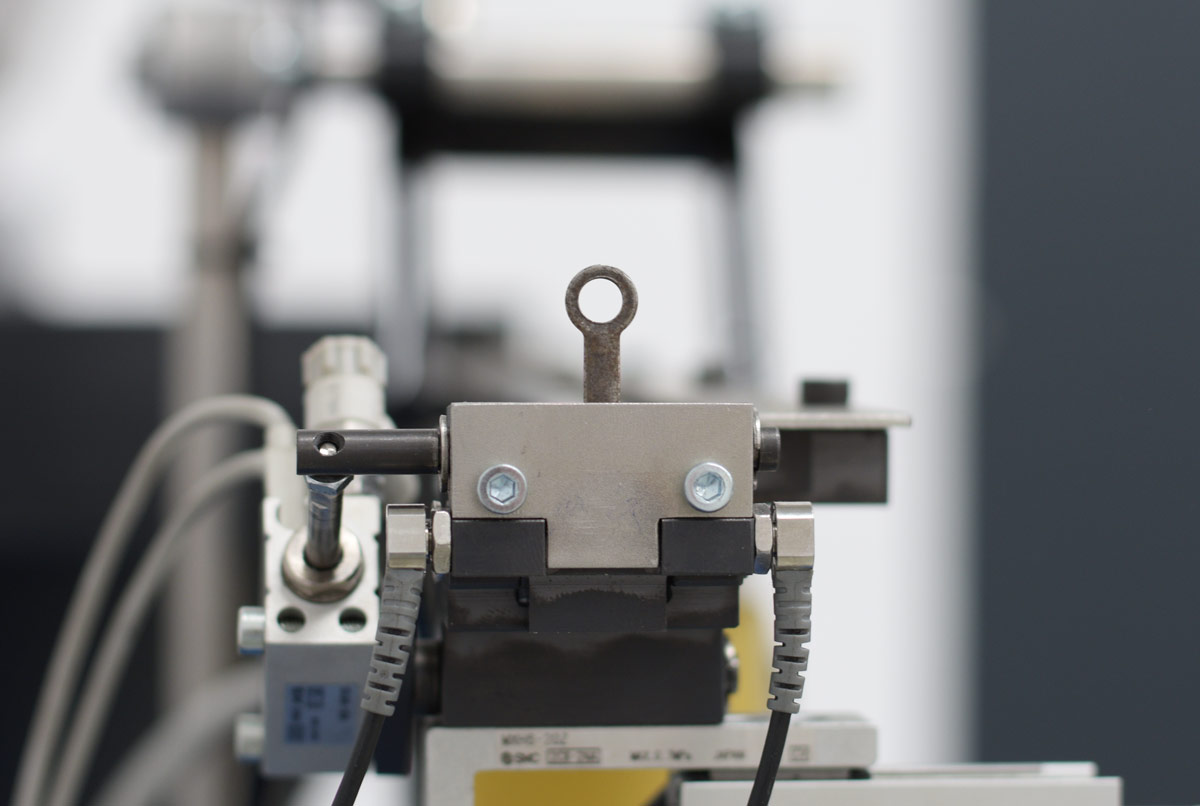
La misión del primer movimiento del paso a paso es que cuando entra, una a una, cada pieza en la cuna de recogida, un cilindro neumático guiado la desplaza lateralmente para que quede aislada. Una vez ahí, el segundo movimiento, servido de un sistema mecánico de giro, se encarga de colocarla en posición vertical y orientarla debidamente; es decir, lista y dispuesta para ser recogida por el robot.
Resumiendo, aunque los circlips abandonan el vibrador en una única posición y tumbados, su entrega, finalmente, se realiza en vertical.
Tras la extracción de cada pieza, el sistema vuelve a su posición de origen para repetir el proceso.
Como dato final, cabe destacar que, aunque la demanda del proyecto es de 15 piezas por minuto, nuestra máquina puede alcanzar una cadencia significativamente superior.
Composición del sistema de posicionamiento
- 1 Tolva alimentadora vibratoria.
- 1 Base vibratoria horaria.
- 1 Cuba de fibra. Diámetro: 400 mm.
- 1 Vibrador lineal MDV-L 450.
- 1 Paso a paso de 2 movimientos.
- 3 Mandos de control.
- 1 Mesa bancada.
Posición de salida de la pieza
Vertical boca abajo.
Número de salidas
1.
Cadencia solicitada
15 piezas / minuto.
Autonomía
4 horas.
Otras soluciones para automoción





›› PARA VER Y ESCUCHAR

Alimentador industrial para circlips
Misión y peculiaridades
Hay casos en los que buscar la solución más eficaz implica, gratamente, encontrar la opción más ingeniosa. Este es uno de ellos.
Lograr la orientación exigida para estos circlips presentaba muchas complicaciones si pretendíamos hacerlo a través de los vibradores, así que optamos por resolverlo mediante dos movimientos posteriores…
Esto significa que la responsabilidad recaía en nuestro paso a paso, algo que abordamos con confianza gracias a nuestra experiencia combinando e integrando estos sistemas en nuestros posicionadores.
La misión del primer movimiento del paso a paso es que cuando entra, una a una, cada pieza en la cuna de recogida, un cilindro neumático guiado la desplaza lateralmente para que quede aislada. Una vez ahí, el segundo movimiento, servido de un sistema mecánico de giro, se encarga de colocarla en posición vertical y orientarla debidamente; es decir, lista y dispuesta para ser recogida por el robot.
Resumiendo, aunque los circlips abandonan el vibrador en una única posición y tumbados, su entrega, finalmente, se realiza en vertical.
Tras la extracción de cada pieza, el sistema vuelve a su posición de origen para repetir el proceso.
Como dato final, cabe destacar que, aunque la demanda del proyecto es de 15 piezas por minuto, nuestra máquina puede alcanzar una cadencia significativamente superior.
Composición del sistema de posicionamiento
- 1 Tolva alimentadora vibratoria.
- 1 Base vibratoria horaria.
- 1 Cuba de fibra. Diámetro: 400 mm.
- 1 Vibrador lineal MDV-L 450.
- 1 Paso a paso de 2 movimientos.
- 3 Mandos de control.
- 1 Mesa bancada.
Posición de salida de la pieza
Vertical boca abajo.
Número de salidas
1.
Cadencia solicitada
15 piezas / minuto.
Autonomía
4 horas.
Otras soluciones para automoción
›› PARA VER Y ESCUCHAR
Alimentador industrial para circlips
Misión y peculiaridades
Hay casos en los que buscar la solución más eficaz implica, gratamente, encontrar la opción más ingeniosa. Este es uno de ellos.
Lograr la orientación exigida para estos circlips presentaba muchas complicaciones si pretendíamos hacerlo a través de los vibradores, así que optamos por resolverlo mediante dos movimientos posteriores…
Esto significa que la responsabilidad recaía en nuestro paso a paso, algo que abordamos con confianza gracias a nuestra experiencia combinando e integrando estos sistemas en nuestros posicionadores.
La misión del primer movimiento del paso a paso es que cuando entra, una a una, cada pieza en la cuna de recogida, un cilindro neumático guiado la desplaza lateralmente para que quede aislada. Una vez ahí, el segundo movimiento, servido de un sistema mecánico de giro, se encarga de colocarla en posición vertical y orientarla debidamente; es decir, lista y dispuesta para ser recogida por el robot.
Resumiendo, aunque los circlips abandonan el vibrador en una única posición y tumbados, su entrega, finalmente, se realiza en vertical.
Tras la extracción de cada pieza, el sistema vuelve a su posición de origen para repetir el proceso.
Como dato final, cabe destacar que, aunque la demanda del proyecto es de 15 piezas por minuto, nuestra máquina puede alcanzar una cadencia significativamente superior.
Composición del sistema de posicionamiento
- 1 Tolva alimentadora vibratoria.
- 1 Base vibratoria horaria.
- 1 Cuba de fibra. Diámetro: 400 mm.
- 1 Vibrador lineal MDV-L 450.
- 1 Paso a paso de 2 movimientos.
- 3 Mandos de control.
- 1 Mesa bancada.
Posición de salida de la pieza
Vertical boca abajo.
Número de salidas
1.
Cadencia solicitada
15 piezas / minuto.
Autonomía
4 horas.