

Acerca de este paso a paso
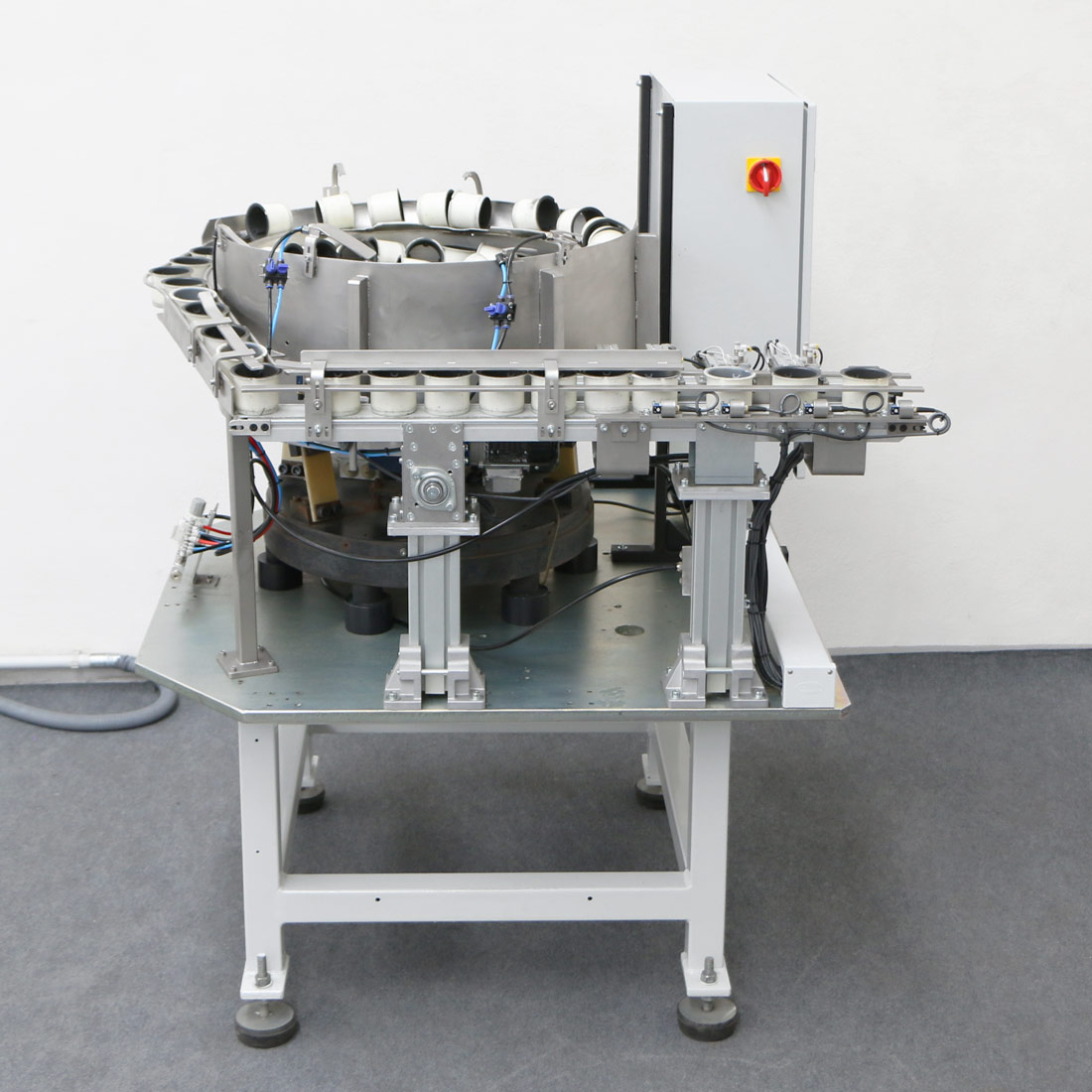
Este sistema paso a paso entrega 3 piezas posicionadas de acuerdo a las especificaciones previamente indicadas por nuestro cliente.
Los casquillos desfilan por una cinta transportadora y el sistema paso a paso, con dos cilindros, se encarga de que vayan pasando de una en una.
Tras el paso a paso, las piezas se encuentran con un sistema de 3 posiciones. La primera pieza llega hasta la posición 1 que es una cuna fija; cuando el sensor detecta que la pieza está posicionada se activa un cilindro generando la posición 2, de modo que el paso a paso deja pasar otra pieza. Este proceso se repite para la posición 3. En el momento que hay piezas disponibles en las 3 posiciones deseadas, un robot se ocupa de llevárselas todas a la vez.
Acerca de este paso a paso
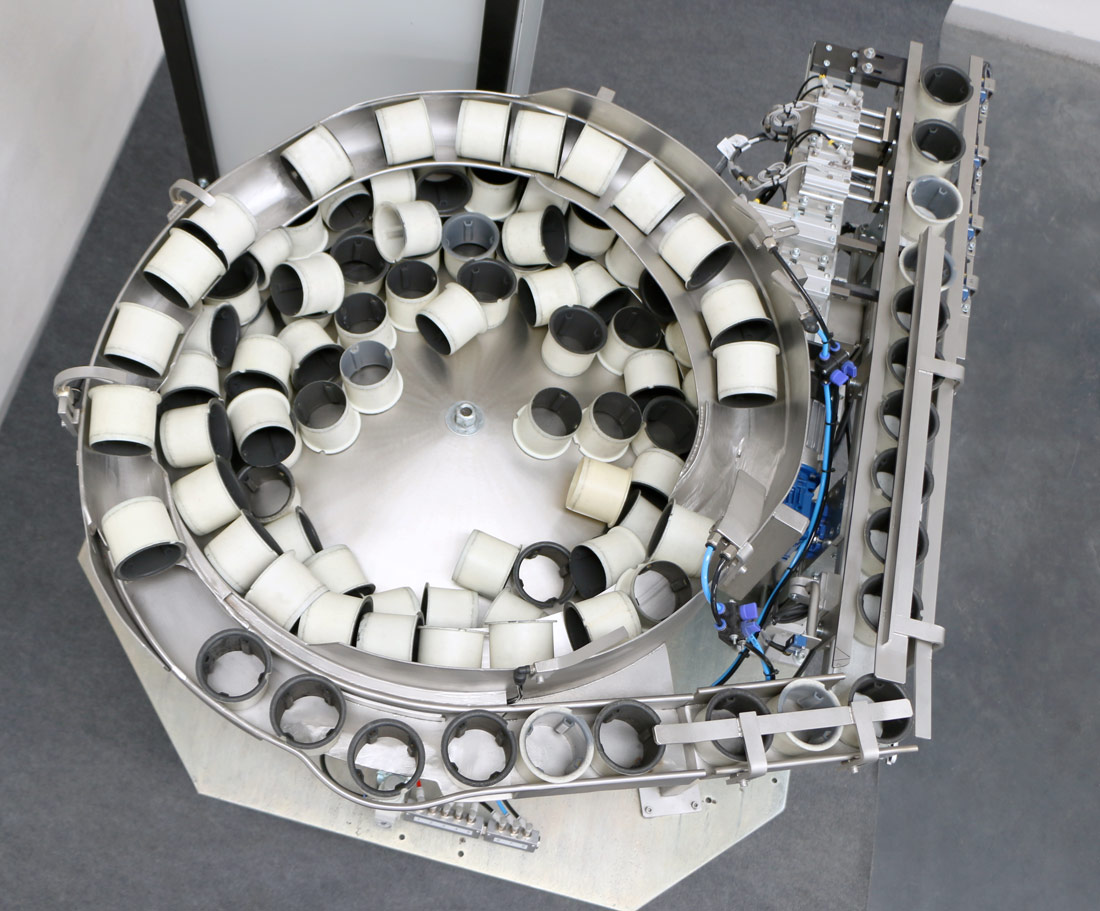
Este sistema paso a paso entrega 3 piezas posicionadas de acuerdo a las especificaciones previamente indicadas por nuestro cliente.
Los casquillos desfilan por una cinta transportadora y el sistema paso a paso, con dos cilindros, se encarga de que vayan pasando de una en una.
Tras el paso a paso, las piezas se encuentran con un sistema de 3 posiciones. La primera pieza llega hasta la posición 1 que es una cuna fija; cuando el sensor detecta que la pieza está posicionada se activa un cilindro generando la posición 2, de modo que el paso a paso deja pasar otra pieza. Este proceso se repite para la posición 3. En el momento que hay piezas disponibles en las 3 posiciones deseadas, un robot se ocupa de llevárselas todas a la vez.
Misión y peculiaridades
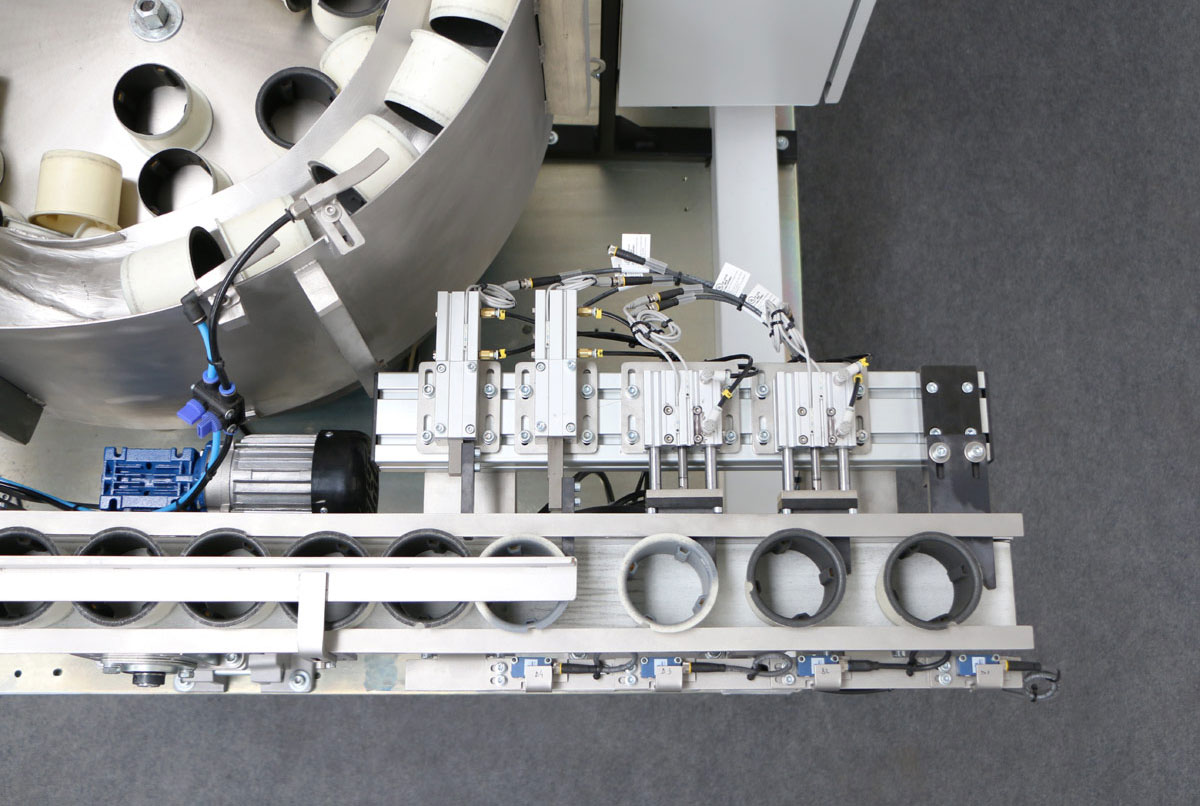
Este sistema paso a paso entrega 3 piezas posicionadas de acuerdo a las especificaciones previamente indicadas por nuestro cliente.
Los casquillos desfilan por una cinta transportadora y el sistema paso a paso, con dos cilindros, se encarga de que vayan pasando de una en una.
Tras el paso a paso, las piezas se encuentran con un sistema de 3 posiciones. La primera pieza llega hasta la posición 1 que es una cuna fija; cuando el sensor detecta que la pieza está posicionada se activa un cilindro generando la posición 2, de modo que el paso a paso deja pasar otra pieza. Este proceso se repite para la posición 3. En el momento que hay piezas disponibles en las 3 posiciones deseadas, un robot se ocupa de llevárselas todas a la vez.