
Acerca de este paso a paso
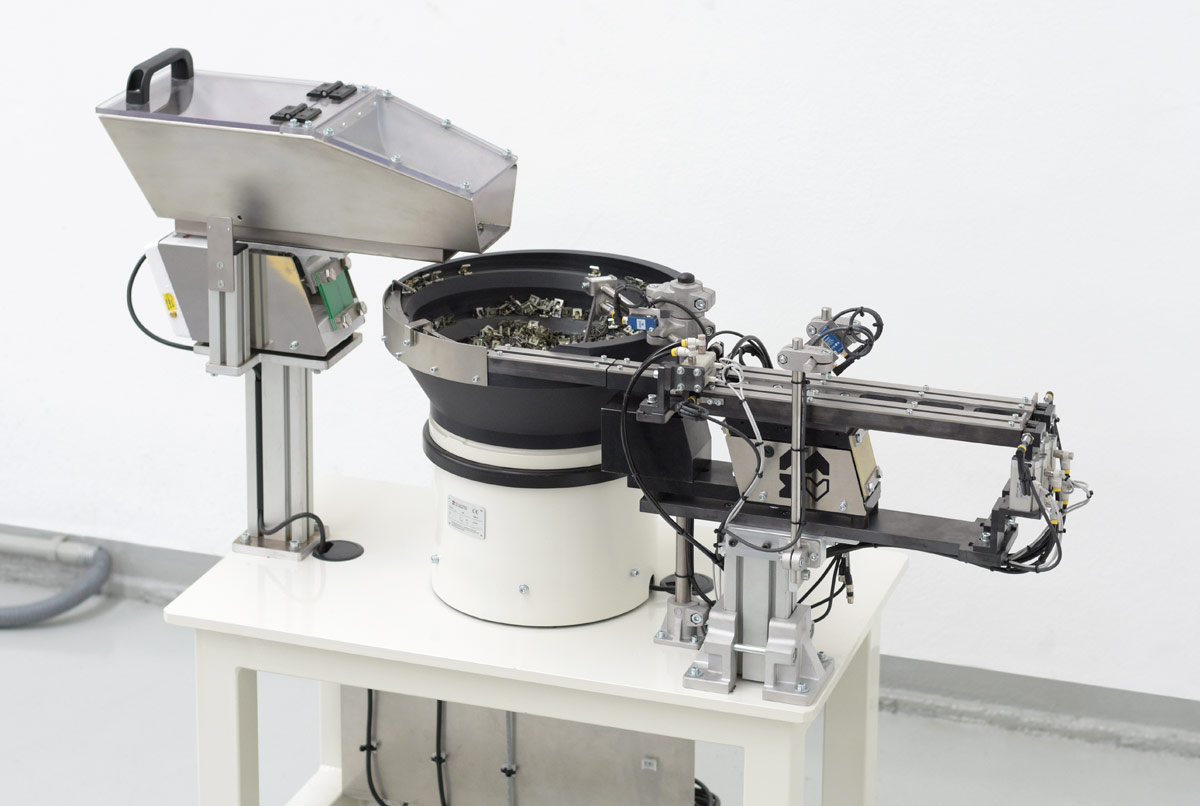
Hemos ideado este sistema para que, gracias a sus paso a paso, sea capaz de alimentar 2 canales individuales desde una única salida.
El primer paso a paso se encarga de distribuir los clips que llegan desde la tolva hasta dos canales distintos según necesidad, es decir, puede enviarlos todos a un canal o a otro, o puede abastecer los clips repartiéndolos entre los dos canales.
Cada canal desemboca en una cuna de recogida de clips. De este modo, en función de la pieza donde vayan a ser insertados dichos clips, el robot o manipulador podrá abastecerse de las dos cunas al mismo tiempo, sólo de la cuna derecha o sólo de la izquierda.
Y la misión del segundo paso a paso es elevar los clips para facilitar la recogida del robot. Al tratarse de dos cilindros independientes puede elevar un clip u otro, o, también, los dos a la vez.
Acerca de este paso a paso
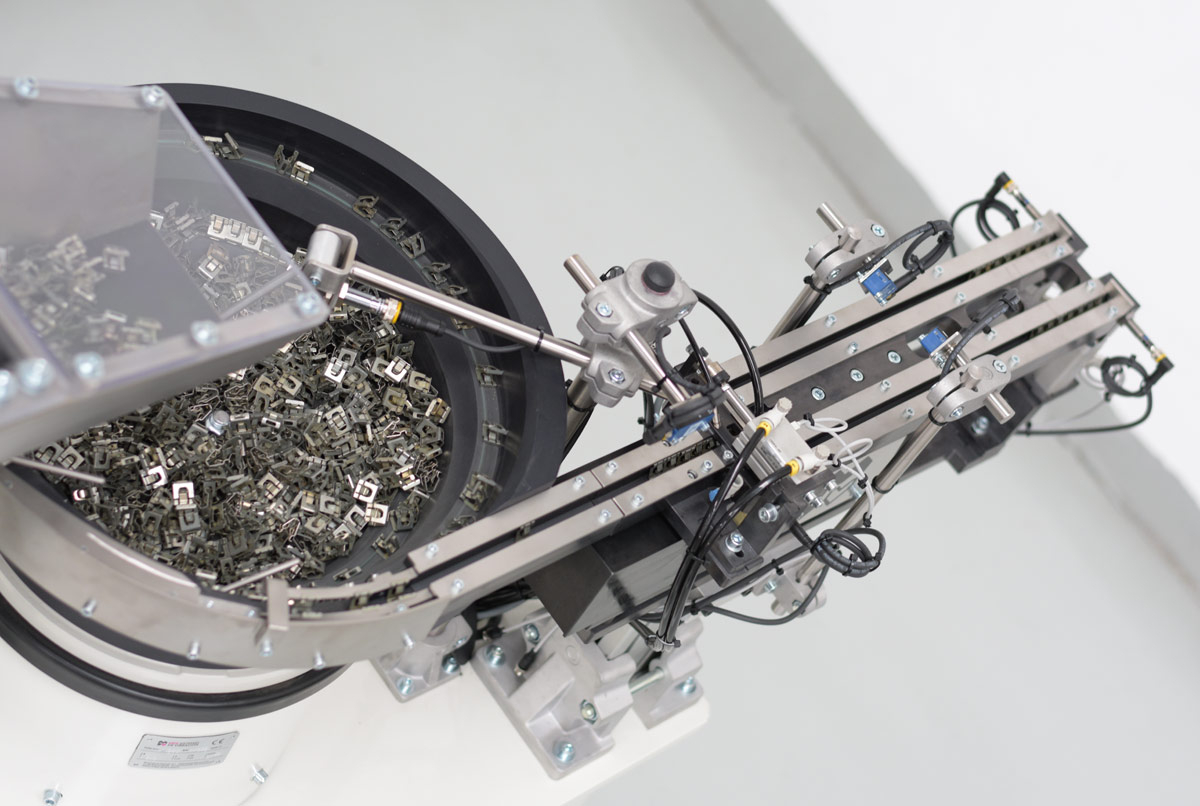
Hemos ideado este sistema para que, gracias a sus paso a paso, sea capaz de alimentar 2 canales individuales desde una única salida.
El primer paso a paso se encarga de distribuir los clips que llegan desde la tolva hasta dos canales distintos según necesidad, es decir, puede enviarlos todos a un canal o a otro, o puede abastecer los clips repartiéndolos entre los dos canales.
Cada canal desemboca en una cuna de recogida de clips. De este modo, en función de la pieza donde vayan a ser insertados dichos clips, el robot o manipulador podrá abastecerse de las dos cunas al mismo tiempo, sólo de la cuna derecha o sólo de la izquierda.
Y la misión del segundo paso a paso es elevar los clips para facilitar la recogida del robot. Al tratarse de dos cilindros independientes puede elevar un clip u otro, o, también, los dos a la vez.
Acerca de este paso a paso
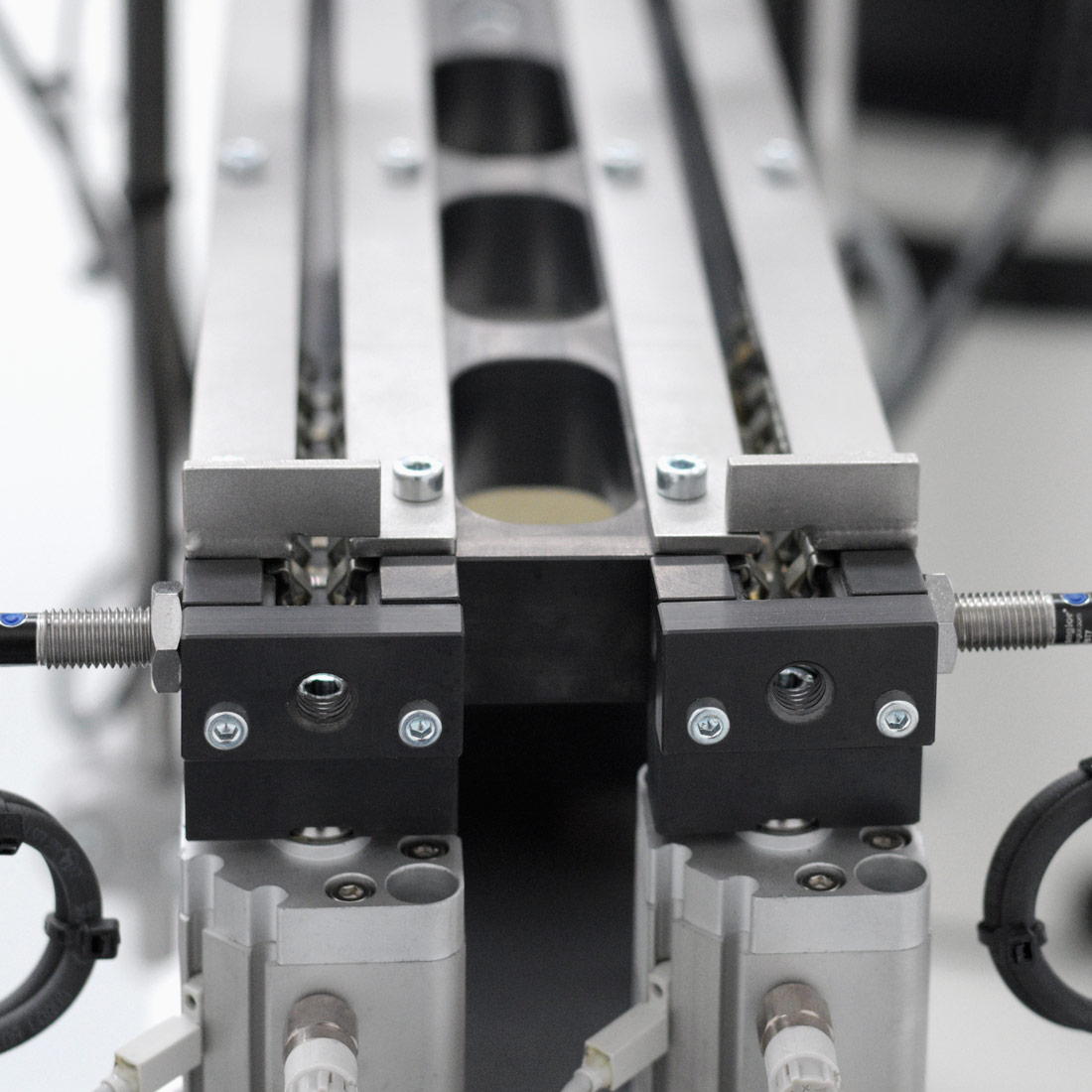
Hemos ideado este sistema para que, gracias a sus paso a paso, sea capaz de alimentar 2 canales individuales desde una única salida.
El primer paso a paso se encarga de distribuir los clips que llegan desde la tolva hasta dos canales distintos según necesidad, es decir, puede enviarlos todos a un canal o a otro, o puede abastecer los clips repartiéndolos entre los dos canales.
Cada canal desemboca en una cuna de recogida de clips. De este modo, en función de la pieza donde vayan a ser insertados dichos clips, el robot o manipulador podrá abastecerse de las dos cunas al mismo tiempo, sólo de la cuna derecha o sólo de la izquierda.
Y la misión del segundo paso a paso es elevar los clips para facilitar la recogida del robot. Al tratarse de dos cilindros independientes puede elevar un clip u otro, o, también, los dos a la vez.