

Alimentador industrial para 3 referencias de casquillos

Misión y peculiaridades
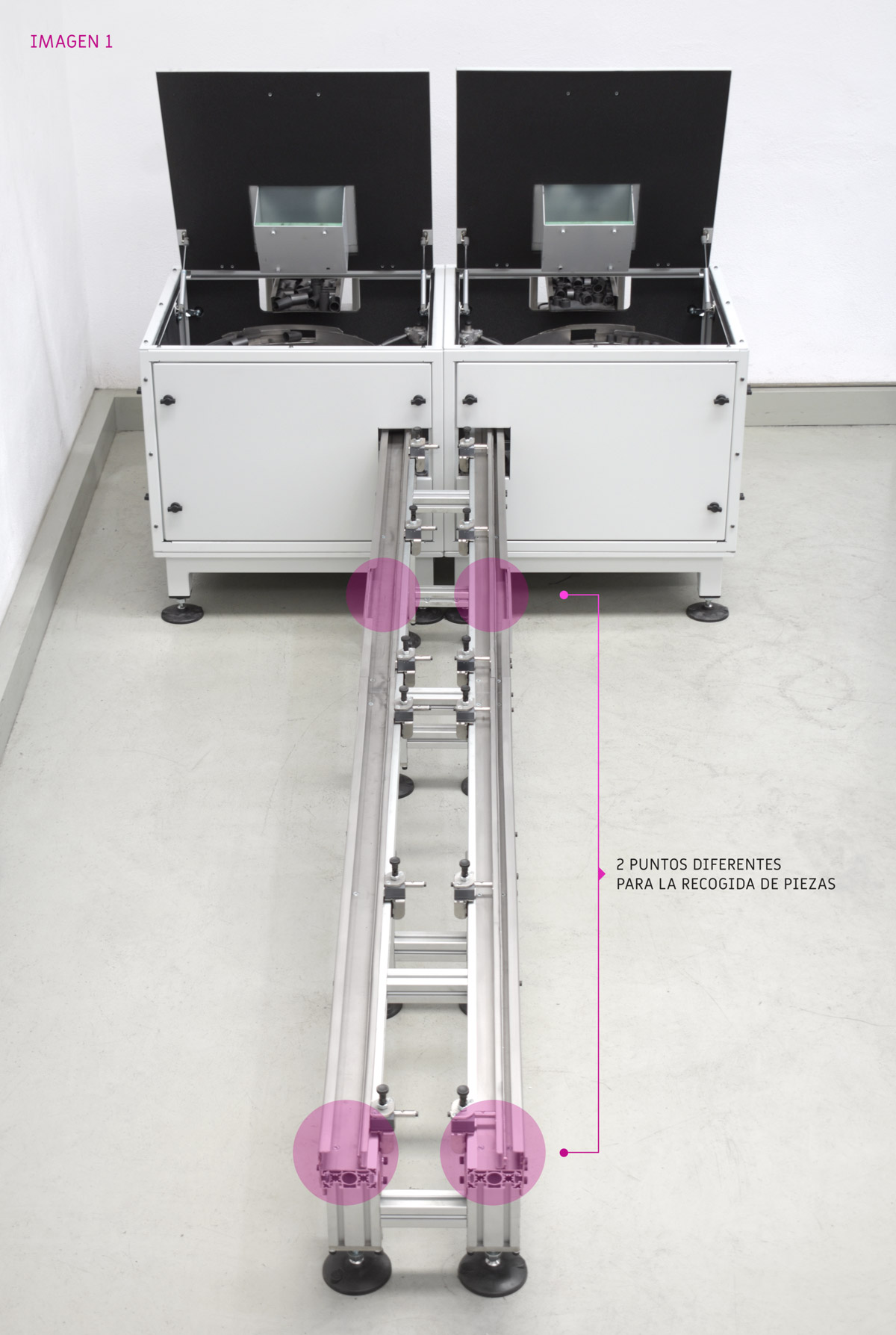
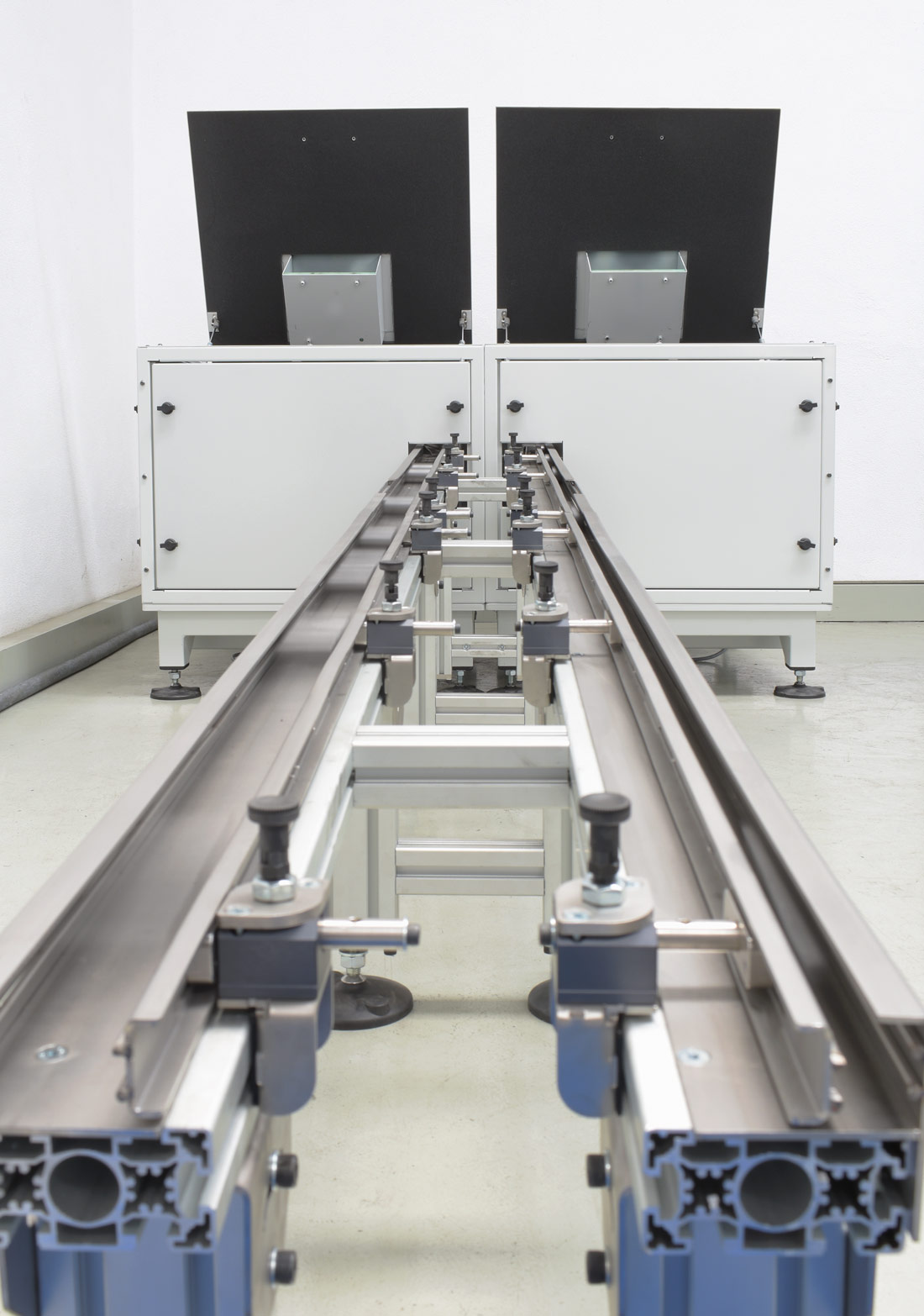
«Un solo sistema, tres referencias de piezas y apenas unos ajustes sencillos para cambiar entre ellas». Este es el encabezamiento del proyecto y que derivamos en dos máquinas simétricas unidas que vienen aprovisionadas con dos rampas de salida de casi tres metros y con doble punto de recogida identificado [ver imágenes 1 y 2].
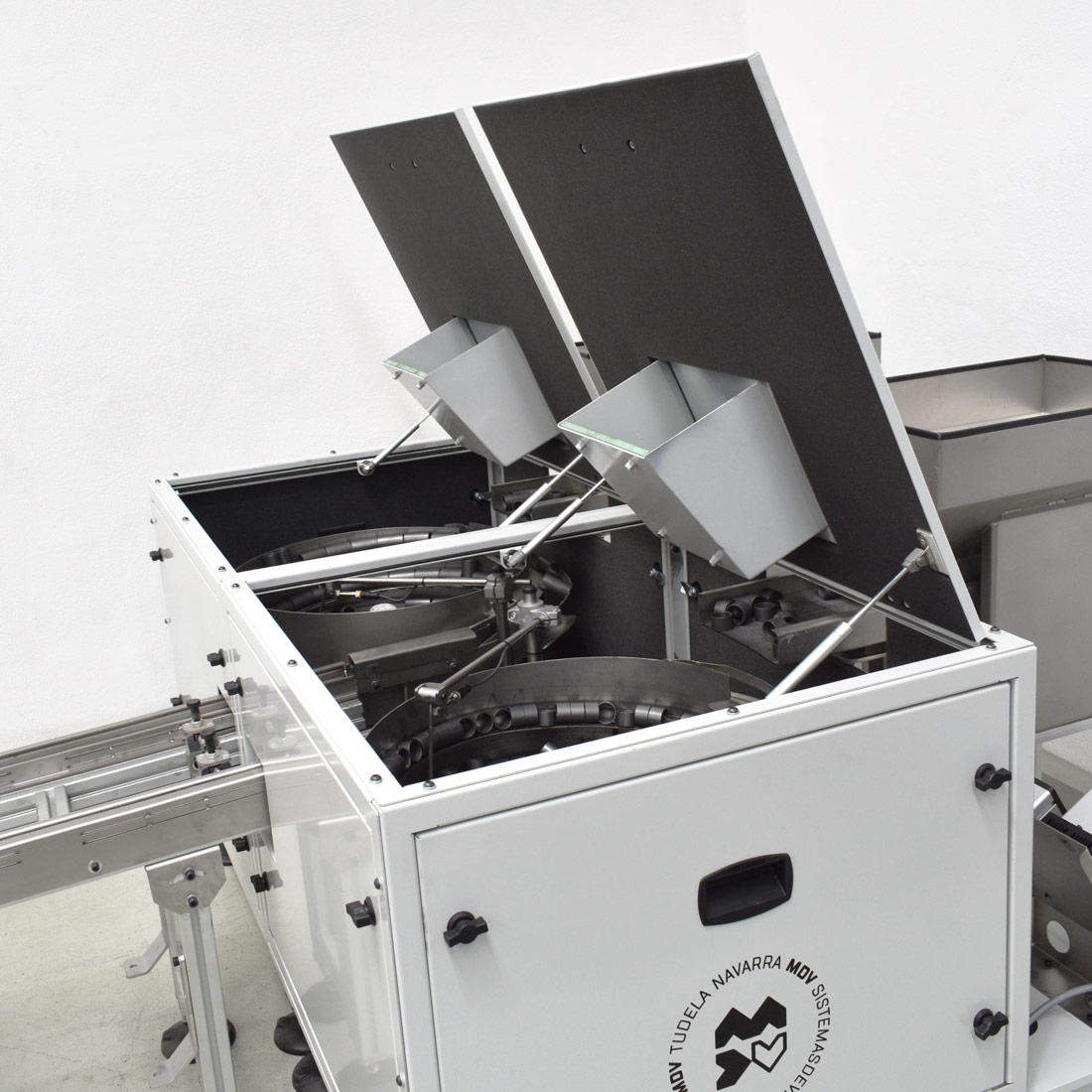
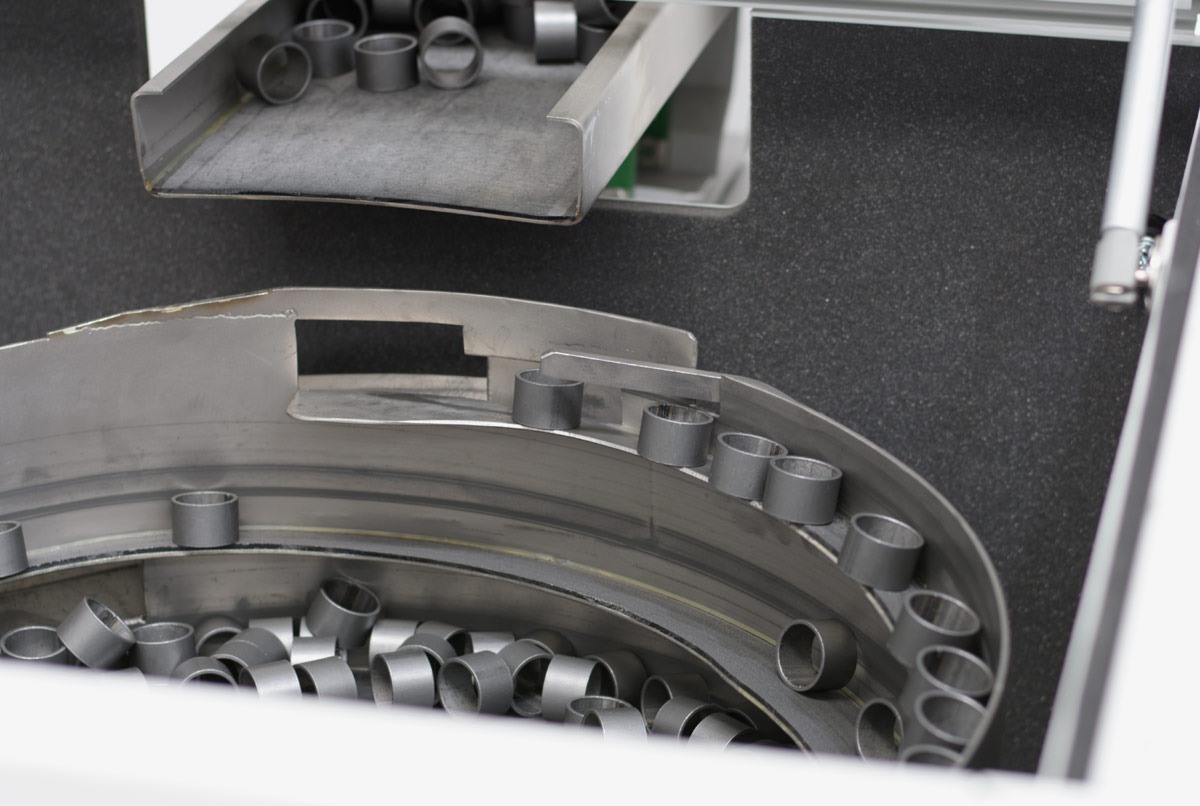
Cada uno de estos dos posicionadores cuenta con su propia tolva de autonomía de 30 litros, una cuba fabricada en acero inoxidable, un vibrador circular y su correspondiente rampa de caída de piezas. Por cierto, las piezas a posicionar son tres modelos de casquillos.
Los casquillos son recogidos por un robot cartesiano –robot industrial que se mueve en líneas rectas a lo lago de ejes X, Y y Z. Ideal para tareas repetitivas– para insertarlos directamente en su soporte. Esto significa que el robot se abastece de los casquillos en la misma posición en que los inserta.
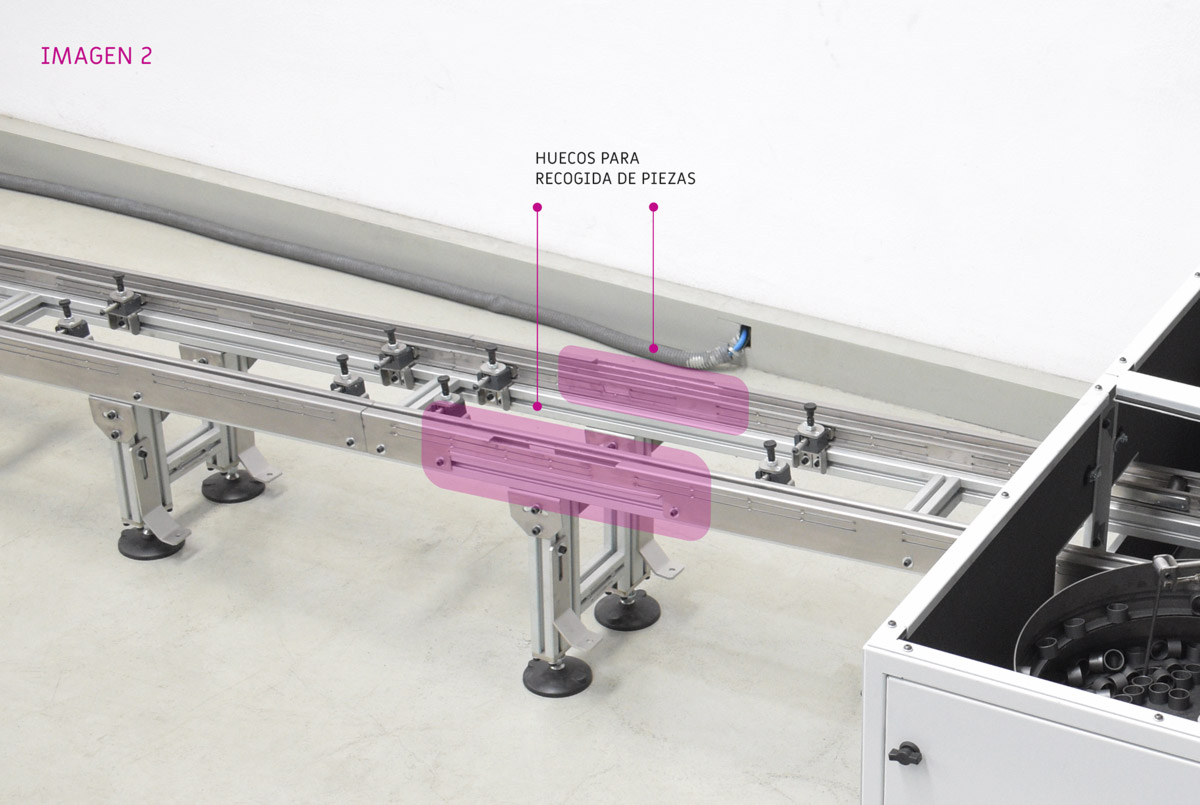
Para cumplir todo esto, el robot necesita recoger las piezas en dos puntos diferentes, a la vez, y separadas entre sí a una distancia concreta. Lo solucionamos dejando un espacio “libre” en la rampa de caída; de esta forma puede alimentarse de piezas tanto en el punto cercano al inicio de la rampa como en el punto del extremo final.
Y para la premisa «[…] y con apenas unos ajustes sencillos de las guías de las rampas para cambiar entre las tres referencias de casquillos» diseñamos un sistema de posiciones fijas que, servidas de un posicionador comercial, consiguen generar las tres configuraciones posibles, previniendo errores y obstrucciones. Es decir, estimulando la fiabilidad operativa del sistema.
Composición del sistema de posicionamiento
- 2 Tolvas alimentadoras vibratorias a medida.
- 1 Base vibratoria horaria + 1 antihoraria.
- 2 Vibradores SRC-400.
- 2 Cubas de acero. Diámetro: 400 mm.
- 2 Mandos de control.
- 2 Rampas de salida.
- 2 Mesas bancadas unidas.
- 2 Cabinas de insonorización.
Posición de salida de la pieza
Tumbadas por el lado ancho y rodando.
Número de salidas
2.
Cadencia solicitada
8 piezas / minuto.
Autonomía
Pieza pequeña, 500 uds. Piezas grandes, 250 uds.
Otras soluciones para industria






›› PARA VER Y ESCUCHAR

Alimentador industrial para 3 referencias de casquillos
Misión y peculiaridades
«Un solo sistema, tres referencias de piezas y apenas unos ajustes sencillos para cambiar entre ellas». Este es el encabezamiento del proyecto y que derivamos en dos máquinas simétricas unidas que vienen aprovisionadas con dos rampas de salida de casi tres metros y con doble punto de recogida identificado [ver imágenes 1 y 2].
Cada uno de estos dos posicionadores cuenta con su propia tolva de autonomía de 30 litros, una cuba fabricada en acero inoxidable, un vibrador circular y su correspondiente rampa de caída de piezas. Por cierto, las piezas a posicionar son tres modelos de casquillos.
Los casquillos son recogidos por un robot cartesiano –robot industrial que se mueve en líneas rectas a lo lago de ejes X, Y y Z. Ideal para tareas repetitivas– para insertarlos directamente en su soporte. Esto significa que el robot se abastece de los casquillos en la misma posición en que los inserta.
Para cumplir todo esto, el robot necesita recoger las piezas en dos puntos diferentes, a la vez, y separadas entre sí a una distancia concreta. Lo solucionamos dejando un espacio “libre” en la rampa de caída; de esta forma puede alimentarse de piezas tanto en el punto cercano al inicio de la rampa como en el punto del extremo final.
Y para la premisa «[…] y con apenas unos ajustes sencillos de las guías de las rampas para cambiar entre las tres referencias de casquillos» diseñamos un sistema de posiciones fijas que, servidas de un posicionador comercial, consiguen generar las tres configuraciones posibles, previniendo errores y obstrucciones. Es decir, estimulando la fiabilidad operativa del sistema.
Composición del sistema de posicionamiento
- 2 Tolvas alimentadoras vibratorias a medida.
- 1 Base vibratoria horaria + 1 antihoraria.
- 2 Vibradores SRC-400.
- 2 Cubas de acero. Diámetro: 400 mm.
- 2 Mandos de control.
- 2 Rampas de salida.
- 2 Mesas bancadas unidas.
- 2 Cabinas de insonorización.
Posición de salida de la pieza
Tumbadas por el lado ancho y rodando.
Número de salidas
2.
Cadencia solicitada
8 piezas / minuto.
Autonomía
Pieza pequeña, 500 uds. Piezas grandes, 250 uds.
Otras soluciones para industria
›› PARA VER Y ESCUCHAR
Alimentador industrial para 3 referencias de casquillos
Misión y peculiaridades
«Un solo sistema, tres referencias de piezas y apenas unos ajustes sencillos para cambiar entre ellas». Este es el encabezamiento del proyecto y que derivamos en dos máquinas simétricas unidas que vienen aprovisionadas con dos rampas de salida de casi tres metros y con doble punto de recogida identificado [ver imágenes 1 y 2].
Cada uno de estos dos posicionadores cuenta con su propia tolva de autonomía de 30 litros, una cuba fabricada en acero inoxidable, un vibrador circular y su correspondiente rampa de caída de piezas. Por cierto, las piezas a posicionar son tres modelos de casquillos.
Los casquillos son recogidos por un robot cartesiano –robot industrial que se mueve en líneas rectas a lo lago de ejes X, Y y Z. Ideal para tareas repetitivas– para insertarlos directamente en su soporte. Esto significa que el robot se abastece de los casquillos en la misma posición en que los inserta.
Para cumplir todo esto, el robot necesita recoger las piezas en dos puntos diferentes, a la vez, y separadas entre sí a una distancia concreta. Lo solucionamos dejando un espacio “libre” en la rampa de caída; de esta forma puede alimentarse de piezas tanto en el punto cercano al inicio de la rampa como en el punto del extremo final.
Y para la premisa «[…] y con apenas unos ajustes sencillos de las guías de las rampas para cambiar entre las tres referencias de casquillos» diseñamos un sistema de posiciones fijas que, servidas de un posicionador comercial, consiguen generar las tres configuraciones posibles, previniendo errores y obstrucciones. Es decir, estimulando la fiabilidad operativa del sistema.
Composición del sistema de posicionamiento
- 2 Tolvas alimentadoras vibratorias a medida.
- 1 Base vibratoria horaria + 1 antihoraria.
- 2 Vibradores SRC-400.
- 2 Cubas de acero. Diámetro: 400 mm.
- 2 Mandos de control.
- 2 Rampas de salida.
- 2 Mesas bancadas unidas.
- 2 Cabinas de insonorización.
Posición de salida de la pieza
Tumbadas por el lado ancho y rodando.
Número de salidas
2.
Cadencia solicitada
8 piezas / minuto.
Autonomía
Pieza pequeña, 500 uds. Piezas grandes, 250 uds.