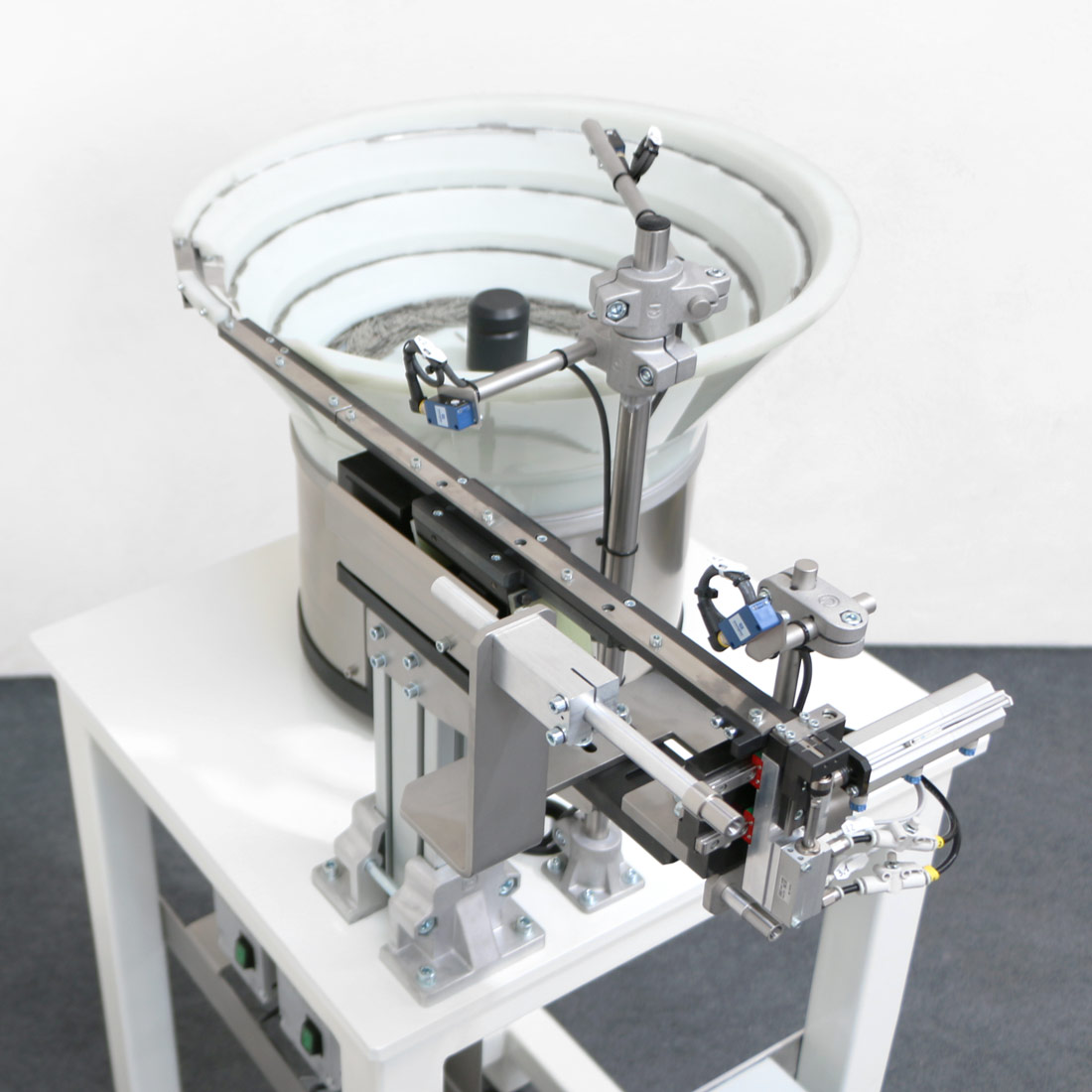


Acerca de este paso a paso
En este paso a paso contamos con una cuna para 2 piezas. Un cilindro neumático de 3 posiciones, aparte de cargar las 2 piezas, también realiza un desplazamiento que coincide con el punto de recogida.
Cuando la cuna está en el punto de recogida, otro cilindro neumático desplaza hacia abajo una parte de la cuna dejando al descubierto una zona de las piezas para que la mano robótica del cliente pueda abastecerse cogiendo las 2 piezas a la vez.
Este equipo vibratorio incluye, además, unos centradores/palpadores para que el robot verifique la posición correcta.
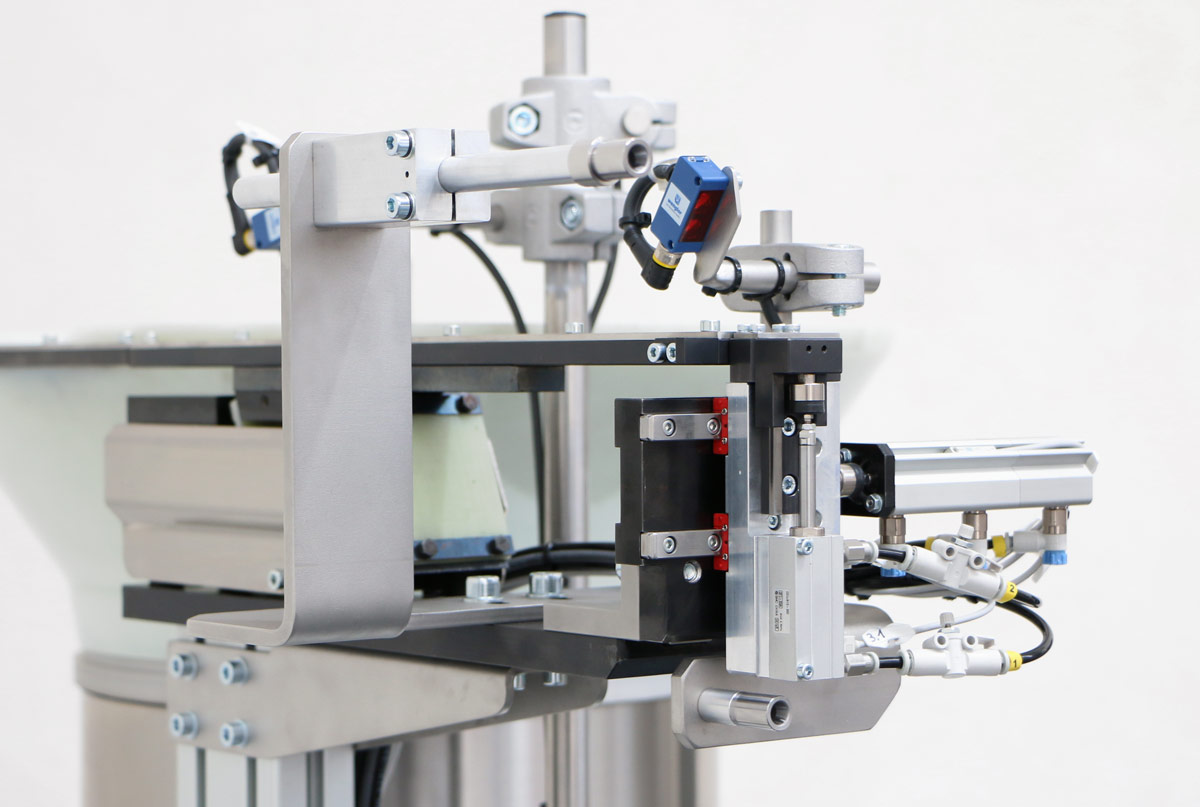
Acerca de este paso a paso
En este paso a paso contamos con una cuna para 2 piezas. Un cilindro neumático de 3 posiciones, aparte de cargar las 2 piezas, también realiza un desplazamiento que coincide con el punto de recogida.
Cuando la cuna está en el punto de recogida, otro cilindro neumático desplaza hacia abajo una parte de la cuna dejando al descubierto una zona de las piezas para que la mano robótica del cliente pueda abastecerse cogiendo las 2 piezas a la vez.
Este equipo vibratorio incluye, además, unos centradores/palpadores para que el robot verifique la posición correcta.
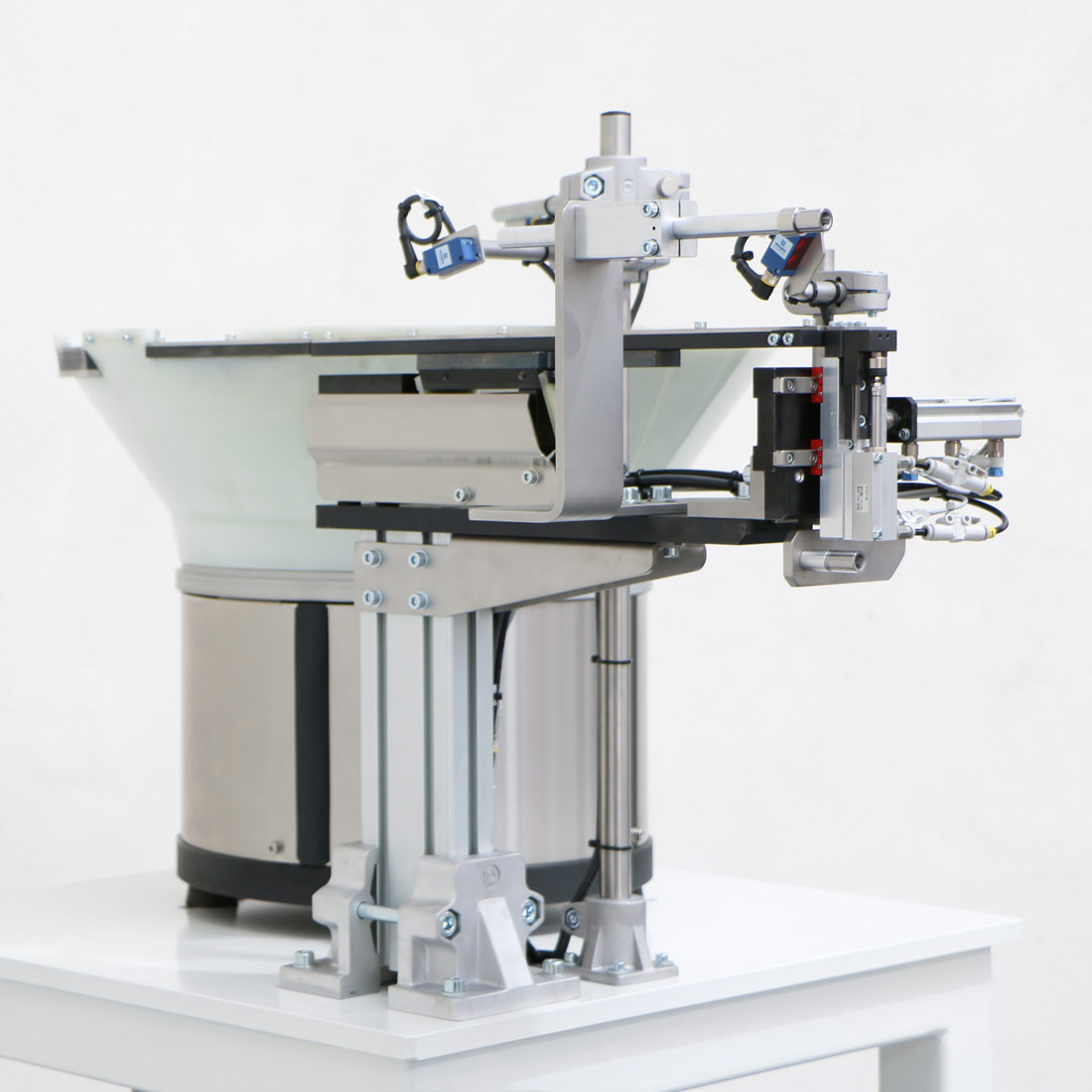
Acerca de este paso a paso
En este paso a paso contamos con una cuna para 2 piezas. Un cilindro neumático de 3 posiciones, aparte de cargar las 2 piezas, también realiza un desplazamiento que coincide con el punto de recogida.
Cuando la cuna está en el punto de recogida, otro cilindro neumático desplaza hacia abajo una parte de la cuna dejando al descubierto una zona de las piezas para que la mano robótica del cliente pueda abastecerse cogiendo las 2 piezas a la vez.
Este equipo vibratorio incluye, además, unos centradores/palpadores para que el robot verifique la posición correcta.