


Acerca de este paso a paso
Aquí, otra solución que demuestra cómo nuestro enfoque paso a paso resuelve con eficacia desafíos específicos.
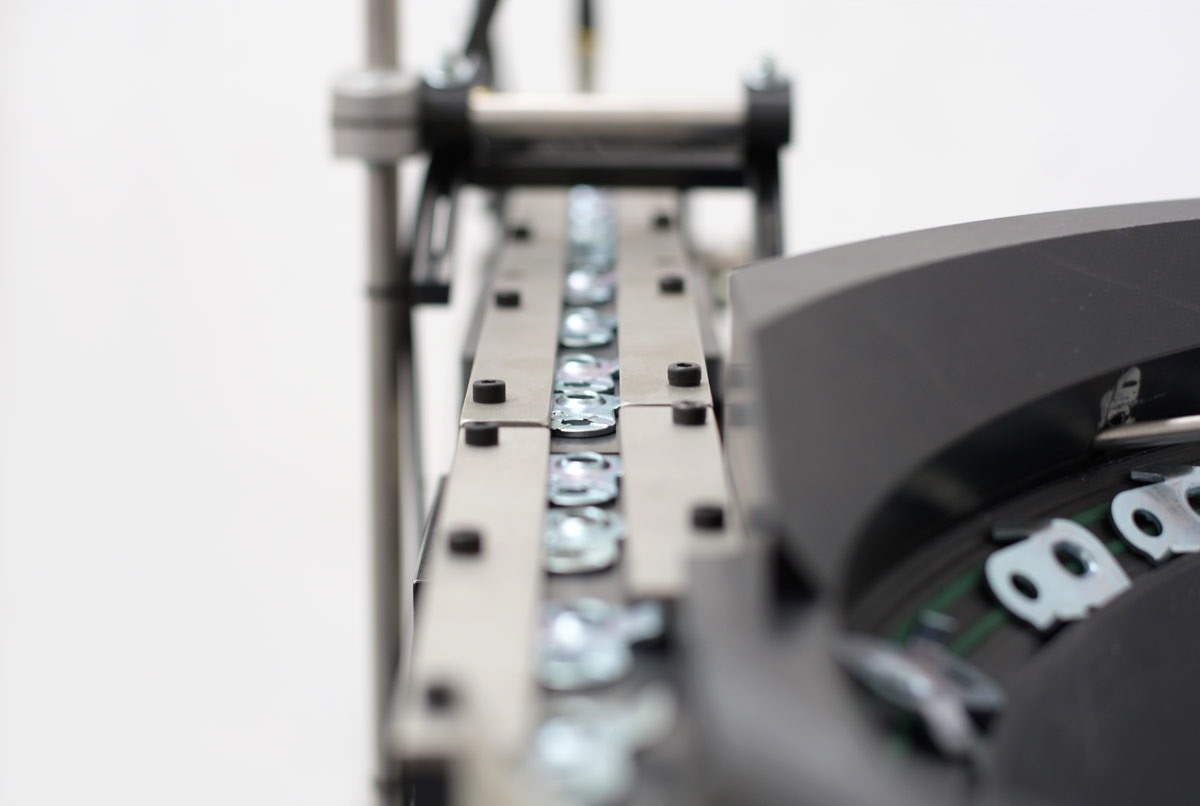
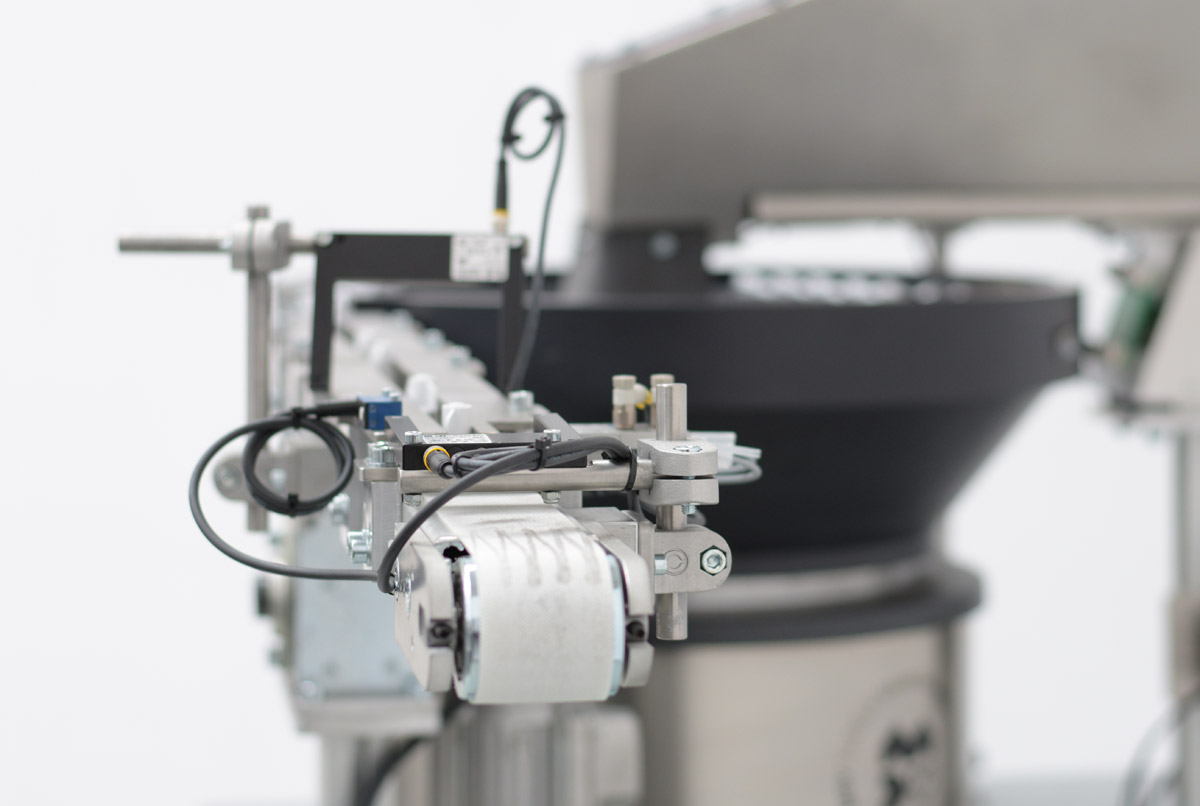
Nuestro sistema admite dos referencias (simétricas) de chapas metálicas. Esto permite volcar las piezas a granel en la tolva, ya sea por separado o ambas a la vez.
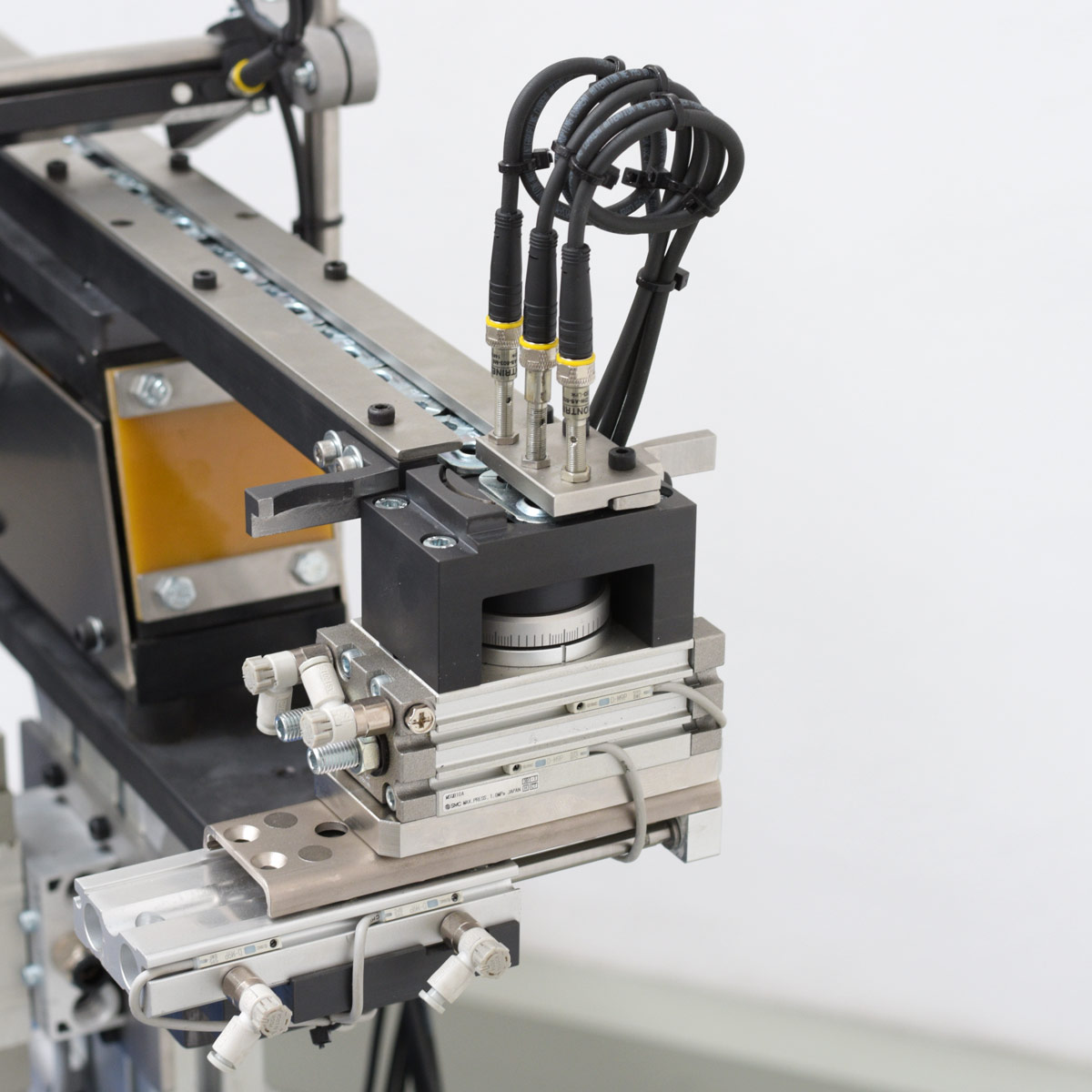
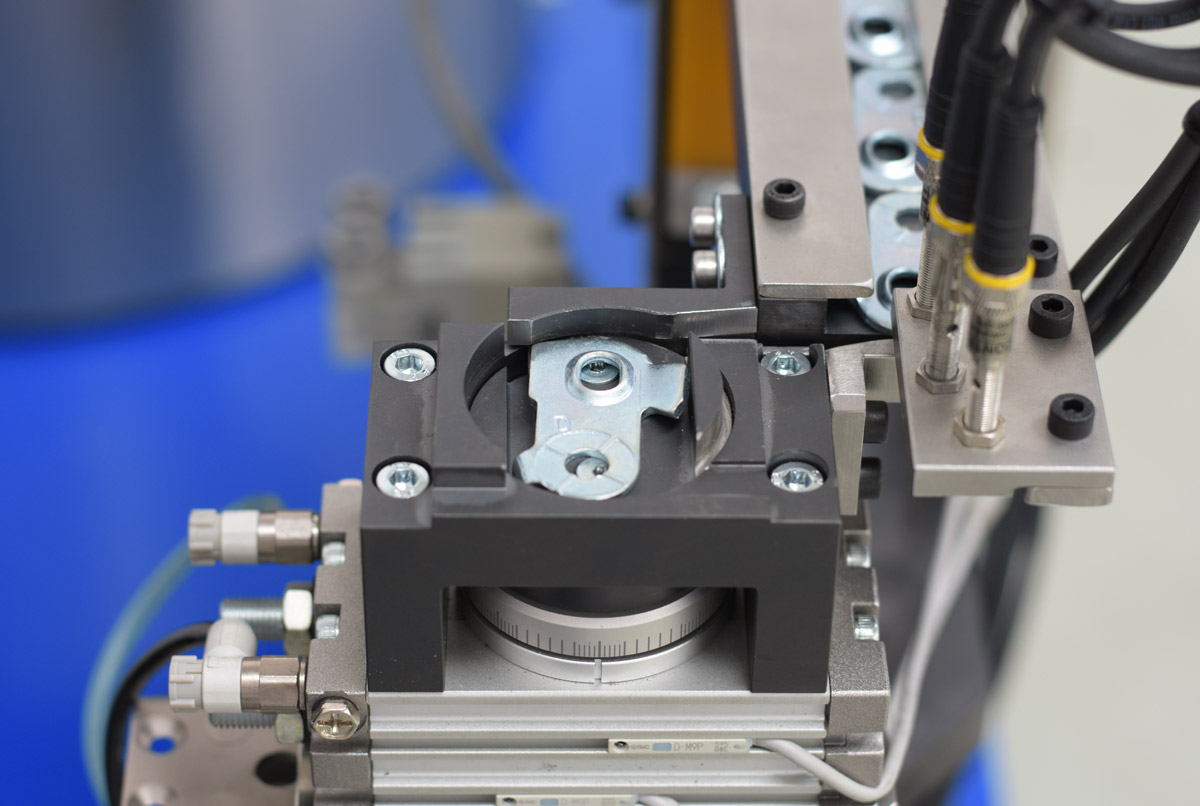
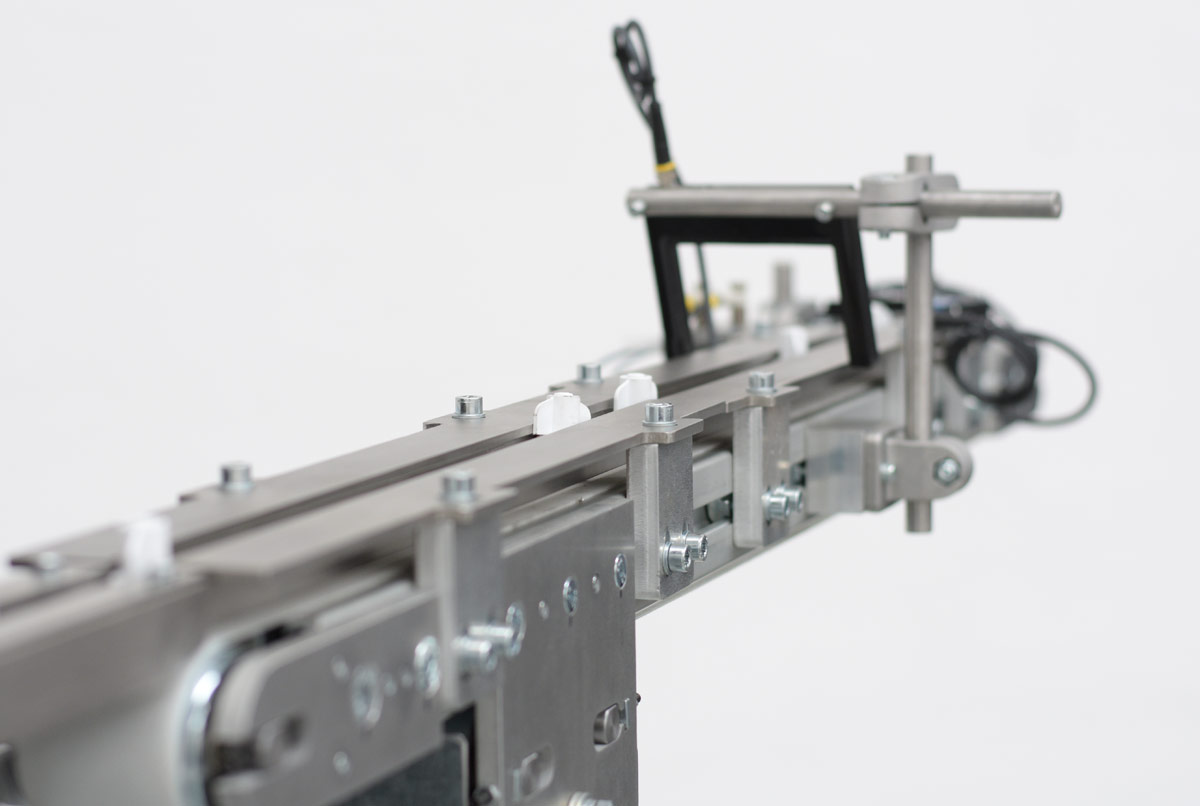
Cuando las piezas llegan a la cuna de recogida, los sensores identifican automáticamente cuál de las dos referencias es. A partir de ahí, una mesa lineal neumática de alta precisión realiza un movimiento lateral que posiciona la pieza justo en el punto de recogida.
Según el modelo detectado, la pieza mantiene su orientación original o se gira mediante un sistema neumático para que el robot la recoja siempre en la posición adecuada.


Acerca de este paso a paso
Aquí, otra solución que demuestra cómo nuestro enfoque paso a paso resuelve con eficacia desafíos específicos.
Nuestro sistema admite dos referencias (simétricas) de chapas metálicas. Esto permite volcar las piezas a granel en la tolva, ya sea por separado o ambas a la vez.
Cuando las piezas llegan a la cuna de recogida, los sensores identifican automáticamente cuál de las dos referencias es. A partir de ahí, una mesa lineal neumática de alta precisión realiza un movimiento lateral que posiciona la pieza justo en el punto de recogida.
Según el modelo detectado, la pieza mantiene su orientación original o se gira mediante un sistema neumático para que el robot la recoja siempre en la posición adecuada.
Acerca de este paso a paso
Aquí, otra solución que demuestra cómo nuestro enfoque paso a paso resuelve con eficacia desafíos específicos.
Nuestro sistema admite dos referencias (simétricas) de chapas metálicas. Esto permite volcar las piezas a granel en la tolva, ya sea por separado o ambas a la vez.
Cuando las piezas llegan a la cuna de recogida, los sensores identifican automáticamente cuál de las dos referencias es. A partir de ahí, una mesa lineal neumática de alta precisión realiza un movimiento lateral que posiciona la pieza justo en el punto de recogida.
Según el modelo detectado, la pieza mantiene su orientación original o se gira mediante un sistema neumático para que el robot la recoja siempre en la posición adecuada.